马克思告诉我们,人的本质是一切社会关系的总和。即使是一个再单打独斗、SOHO 的人,除非他远离社会独自一人荒野求生,不然他就需要与人接触。

我们在日常生活中,会接触到合作的同事、对接的甲乙方,会遇到物业、居委会、水电暖,以及最重要的——家人。
我们一定特别喜欢配合默契的同事。他知道你需要什么,你知道他能提供什么,你们可以配合起来更高效地完成任务。我们也一定希望自己的另一半和自己配合默契,比如我想象中的两人生活就是我扫地来我洗碗,我洗衣来我做饭……但要实现这种酣畅淋漓的配合,一定需要长时间的了解和磨合。

这周五我参加的理想汽车安全驾驶学院,就是一个让车主与未来家庭的一份子——理想 L9 ——磨合的地方。
造车理念
理想汽车,曾用名「车和家」,一直主打带娃奶爸专属电动车这一细分市场,实现了细分市场垄断级的成绩。在本次课程开始的宣讲中,理想也宣传了「创造移动的家,创造幸福的家」这一口号。

所以,理想 L9 是一辆车,又不只是一辆车。它不只是一个工具,还是你的家庭成员,同时还是伴随出行面对各种路况难题的伙伴。那么就和同事、配偶需要了解与磨合一样,安全驾驶学院提供了一个了解车辆能力边界的重要机会。
这就像建议情侣在结婚前进行长途旅行增进了解。
在我的设想中,每一位理想 L9 的新车主都应该在驾驶理想 L9 上路之前先来参加安全驾驶学院的培训。
毕竟,安全是一个幸福的家的保险。
安全边界
这次我参加的安全驾驶课程主要分成三个课程,特殊路况驾驶安全、城市道路驾驶安全和智能驾驶安全。

课程开始前的讲解环节简单介绍了安全驾驶学院要进行的几个项目,每个项目对应的日常生活场景,不同场景下理想 L9 开发团队进行的针对性优化以及辅助驾驶系统何时激活和应对策略。
当然这里面我觉得最重要的内容是辅助驾驶系统何时无法起效。在这个环节中,讲师描述了理想希望并努力为车主带来更安全、更便捷和更舒适的智能电动车的理念。
需要注意的是,这三点并不是并列关系,安全是三者中最重要的项目,理想表示不会为了便捷和舒适而牺牲安全。

同时,人力有时穷。
作为你的出行伙伴,理想 L9 对安全环节并不是大包大揽地说没问题,而是更加坦诚负责任地说有些事情它做不到,人与车的配合才能达到更高水平的安全。
就像传统安全驾驶除了操控方面的培训,还会有防御性驾驶一类的驾驶意识上的培训一样,整个理想汽车安全驾驶的目的就是要教大家知道什么时候会有风险以及怎样应对风险。这样才能做到更安全地用车。
总而言之就是要告诉你一个词——边界。
所以我认为这部分的理论知识的内容其实可以更加详尽一些,甚至可以引入问答或者考试环节,因为这是尽快了解你未来的家人和伙伴理想 L9 的能力边界的重要部分。
驾驶体验
城市出行驾驶部分主要由以下几项体验组成,分别是城市湿滑弯道驾驶、不同附着力路面的紧急变道、一个利用 360 环视加透明底盘功能在狭窄区域掉头,以及郊野游玩驾驶。
城市道路驾驶部分是先加速过减速带,然后在一个足够宽敞安全、且不停洒水的场所进行定圆驾驶,转两圈之后驶出,做一个不同路面的紧急变道。教练先带着大家跑了一圈,对此我的评价是,开得很爽很刺激,下次别开了。
轮到我试驾了,出发一脚加速到时速 60km/h 左右,高速下过减速带如若无物。然后减速进入定圆。

在教练的指导下我以 40km/h 开始绕圈,慢慢加速到 60、70km/h。车身侧倾,人在车里感受到横向的加速度,靠外侧的腿已经需要使劲来支撑身体了。最后以响胎结束这定圆驾驶的环节。
这一部分考验是理想自研的底盘控制系统。在定圆驾驶中,方向盘始终保持稳定的指向,为驾驶者带来充足的信心。
出了定圆就是一个两种路面的紧急变道环节。照片中颜色不同的两种路面,一种是摩擦力比较大的柏油路,另一种是摩擦力较小的水泥路。在以接近 50km/h 的行驶时突然从柏油路变道到水泥路再变回来。理想 L9 表现的非常稳定,牵引力控制系统介入非常及时,几乎无感的成功通过。

但由于与教练的速度差距过大,所以其实自己驾驶的时候刺激感是下降的,远没有坐教练车时候来的刺激。
郊野游玩驾驶部分则是斜坡行驶、连续交叉轴、陡坡、涉水几项内容。主要是针对不同的场景需要切换驾驶模式,比如斜坡需要降低车身高度,陡坡涉水都需要打开越野脱困模式抬高 40mm,涉水还建议开启纯电模式,而这几种都需要开 360 环视来注意观察小心盲区。剩下的就是稳住油门、持续踩油、以及保持低速。

这个环节我觉得最好玩的是斜坡行驶,而且是坐在副驾上的斜坡行驶。因为这时候的悬空感非常刺激。其次就是爬陡坡的环节,因为爬陡坡是在涉水环节之后,此时轮胎和刹车都是湿的,而路面也被其他车辆打湿了。这时候就要缓慢增加油门开度,在上坡过程中维持住油门。虽然也出现了打滑的现象,但电子限滑很好的控制住了动力,这个 40 度的坡对于我这种新手来说也没有什么难度。
不过四个项目体验下来,我感觉绝大多数的车主在几十年的开车过程中都很难遇到这一部分的场景,但「大数定理永远滴神」,谁让有非得开着理想上成佛坡的人呢。
所以理想专门设计了这个环节告诉车主,在这样的环境中,你的理想 L9 是可以基本胜任的,更困难的地方就别随便糟蹋你的家人你的伙伴你的爱车了。
辅助驾驶
终于到了我们超级充电站最关注的辅助驾驶环节了,不过这里体验的不是我们早已展示过的导航辅助系统。这项体验一共四个项目,涉及到行车安全的两个系统功能,分别是 AEB 系统识别鬼探头和消失的前车项目,以及激光雷达识别翻倒车辆、水马类道路障碍物。

小孩鬼探头这种事故很难避免,也屡屡上过热搜。我们的微博账号@超级充电站小编 也曾多次发表微博讨论过这个问题,很多距离较近的车祸视频看了后的第一观感是,以普通人的反应能力是真的没有办法应付。最后得到的结论就是司机提高警惕,在视野不好的地方谨慎慢行,而对于家长来说就是看好孩子,对于年龄较小的孩子就得牵绳。
消失的前车项目,刚一听到的时候我以为是辅助驾驶系统识别不了静止或者异形车辆导致不渲染,在车机上看不到的情况。

而实际上这个项目是在我们启动了自动巡航跟车时,前车遇到静止车辆快速打方向避让的情况,此时作为后车的我们如果注意力不集中反应不及时就容易追尾静止车辆。
当前车突然变道后,车辆传感器在探测到前方静止的车辆尾部时,会对距离进行判断。如果距离较远,会是 ACC 来进行制动,此时刹车力度比较柔和,会缓慢刹停。而一旦距离较近,AEB 就会启动进行紧急刹车,此时就相当于一脚踩死了刹车,刹车非常剧烈。

也就是在这个项目中,由于体验中一直都使用了同一辆理想 L9,在连续成功了几次 70 公里时速下的紧急刹停之后,刹车过热导致热衰减没有刹住,造成了轻微追尾。
而另外两个项目,激光雷达识别翻倒车辆和水马很好理解,就是可以识别了。由于是依靠激光雷达进行的识别,所以必须在 NOA 启动之后才能起效。

启动 NOA,当激光雷达识别到前方是翻倒的车辆或者水马时,就会缓慢减速制动直到刹停,整个刹车过程比较柔和。

后来 QA 环节中有人问,理想的激光雷达能识别翻了的车和水马这两样了,什么时候识别其他东西,比如小动物?
这当然要依靠进一步的标注和训练了,毕竟判断对一样东西仅仅是开始,还得尽量减少误报的概率。
同样在本次学习最后的 QA 环节中,我意识到可能会有不少人对车上各项系统功能的理解不到位。车上的那么多设备并不是随时都在工作的,基于各种考虑,肯定是要试图用更低的功率覆盖更多的场景解决更多的问题。而且各种设备都是有使用寿命的,所以在安全的前提下肯定要省着点用。在理想 L9 上可以简单地认为只有在启动了 NOA 之后激光雷达才会开始工作。
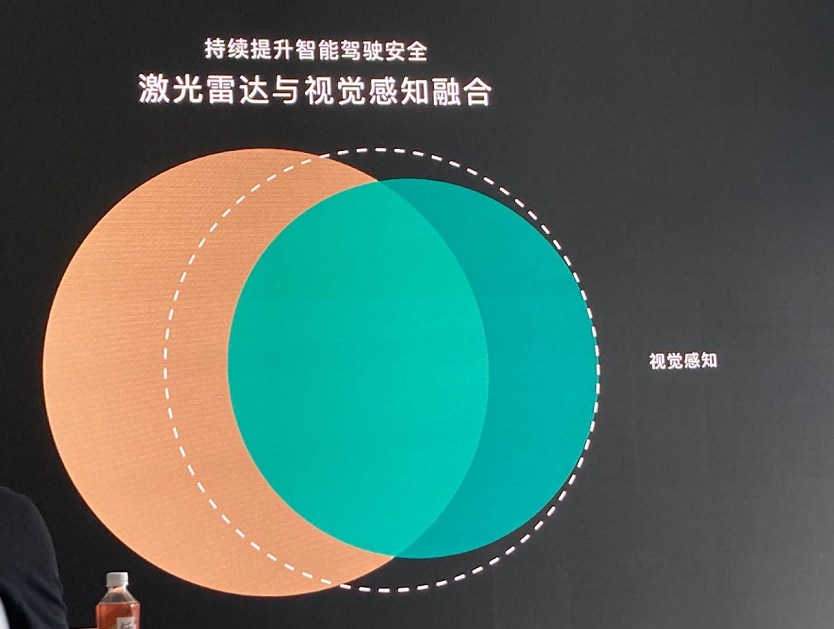
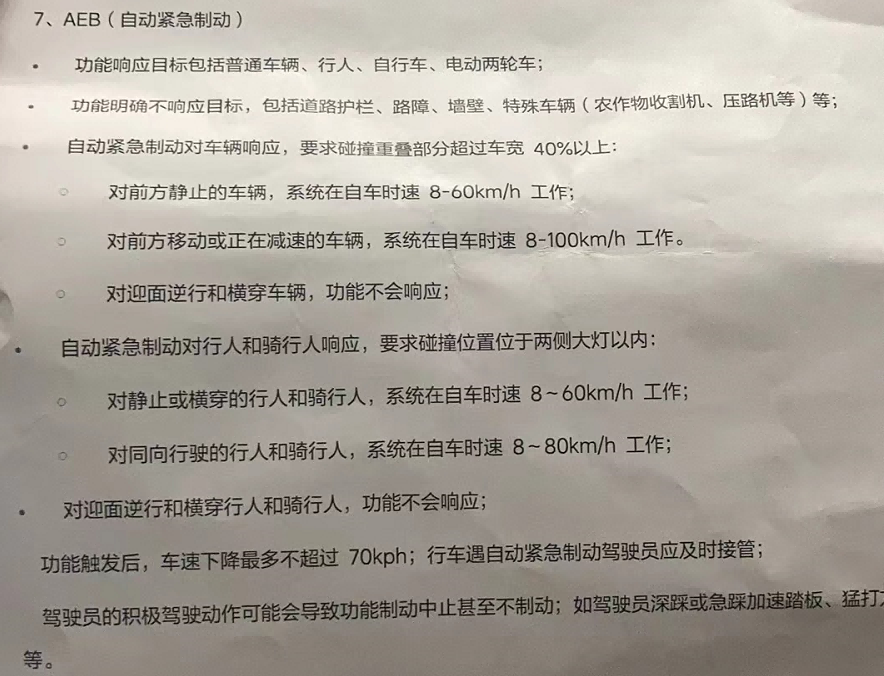
而 AEB 紧急刹车系统是默认启动的全域也就是所有情况下都会工作的功能,但它依靠的是摄像头和毫米波雷达,针对交通参与者进行识别,判断小于安全距离时进行主动刹车的一项功能。AEB 和激光雷达之间目前并没有什么关系。
同时,AEB 识别的范围更小更准确,但 AEB 同样有很多的局限性。
首先是识别能力。刚刚说了,AEB 是针对交通参与者的系统功能,所以 AEB 只会识别路上的车辆和行人,包括自行车等,对于各种其他障碍物包括一些特殊车辆都是无法识别的。所以以后不要再遇到撞墙撞石墩子的时候问为什么 AEB 没有启动了,AEB 能力有限不识别这些障碍。而且它对这些交通参与者的朝向和移动方向以及所处的位置也有要求。
有人可能要说了,这也不行那也不行,要你何用?我之前的经历表示,至少对于正常行驶时候处理得还是挺好的,确实有很大的帮助。
其次是速度。AEB 针对不同情况下的的速度是有极限的,同时 AEB 起作用后车速下降最多不超过 70km/h。理想 L9 并不是超人,它的 AEB 功能不可能突破反应速度和刹车距离的时空物理极限,更不可能像超人接住坠楼的路易丝一样,有什么生物保护力场。
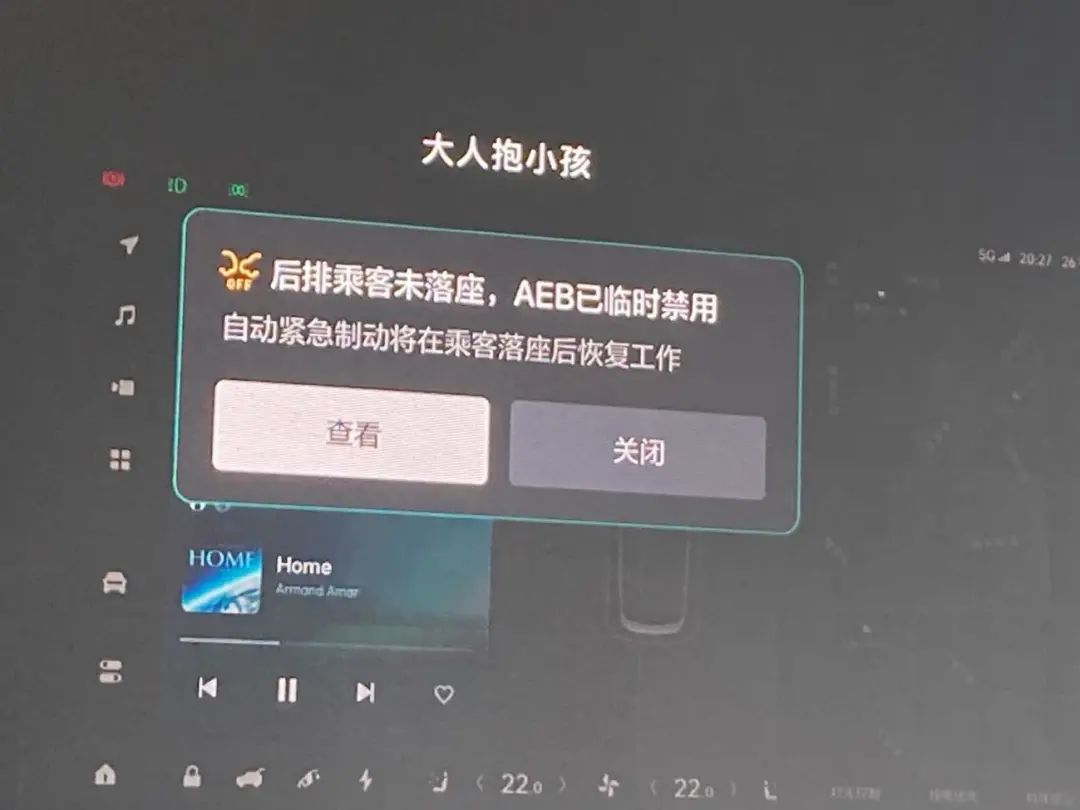
最后,AEB 在某些情况下为了行车安全也不会工作。比如驾驶员主动深踩刹车、急踩加速踏板或猛打方向盘等情况,还有车内传感器判断乘客未落座或抱小孩的情况。相信这几种情况很好理解,防止 AEB 启动造成对驾驶员的干扰和对车内乘员的误伤。
总结
首先要说,我玩得很开心。参加理想安全驾驶学院的整个过程,设置的几个项目,体验都是很好的。里面好多项目我都是第一次经历,尤其是越野驾驶的走斜坡、交叉轴、40 °的陡坡、50cm 的涉水等项目,都让我玩得非常开心。

但考虑到理想安全驾驶学院的目的,我对这些体验项目的成功率觉得有些不满意,它们的成功率都太高了。
除了消失的前车项目中因为同一辆车频繁的高速刹停导致刹车热衰出现刹不住的轻微追尾之外,其他的项目都是成功的。
或许有人会奇怪,实验项目成功不是好事吗?
我想说的是,成功在安全驾驶学院中不一定是好事。安全来自警惕,事故出于麻痹。而成功就可能会让人麻痹。
在我看来,车主参加安全驾驶学院,就像是高考前的冲刺。离开安全驾驶学院,车主就要和自己的伙伴理想 L9 一起面对社会道路的考验,持续很久的大考验。所以这个考前冲刺的时候,应该是掏出理想 L9 的错题本来。尤其是安全驾驶学院的主题就是边界,项目成功说明在安全边界的里面,没有感受到边界啊。
所以在此,我想向理想安全驾驶学院提出一点建议,多设置几个会导致失败的案例。不一定亲身体验,可以录制成视频向车主播放。这样才能明确边界。
另外还可以设置一个项目,比如抱着不同体重的假人急刹车,体验一下究竟能不能抱住,以此来警醒那些不用安全座椅抱着孩子的家长们。

如果是我来设计课程,我会把整个学习课程分成三个部分,理论学习,驾驶体验和辅助驾驶体验。即延长和加重一开始的介绍环节。
理论学习固然可能会有些枯燥,但我觉得理论知识相当重要。毕竟短时间的试驾不能面面俱到只能挑重点,这种情况下理论学习是非常有效的补充,而且学习了理论之后再去实际体验才能感受得更清晰,就不会再问出激光雷达有没有参与 AEB 的问题了。
在生活中,我们固然希望朋友伙伴或配偶水平超群,但我们更不会喜欢眼高手低胡吹牛逼的人。只有在真正经历一些极限条件导致的失败、明确了各种系统的边界之后,车主们才会真正地明白并记住,我们的家人、伙伴——理想 L9 在日常使用中还是很靠得住的。

我想,这才是安全驾驶学院的意义。
原创文章,作者:刘阳,如若转载,请注明出处:https://www.cydao.com/9918.html




