如果要给北京七月的第一周找一个关键词,我想是「淅淅沥沥」。
动辄百分之八九十的湿度,让一向习惯干爽的北方人民格外不适。当然了,像我这样「忘记带伞晚期患者」是没这个烦恼的,毕竟,我都是直接被淋湿。
湿滑路面给本就拥挤的北京带来了新难度,最近路上的剐蹭事故显著变多。当然了,像我这样「摇不到号星人」也是没这个烦恼的,毕竟,我只能一手捂着心口,一边盯着网约车的计时费欢快地往上跳。
这种时候,一场来自沃尔沃的「麋鹿公开课」可太适合我了,「北欧」、「麋鹿」,听着就干爽又解气。
课是让你坐着听的
人要开始丧,多少是会带着一点「长尾效应」。
原本在我的想象中,这场「麋鹿公开课」应该是关于麋鹿测试的动态试驾活动吧?我应该能好好撒撒欢吧?
谁能猜到,一场由沃尔沃举办的,带着「麋鹿」关键词的活动,竟然真的就只是一堂课,一堂坐着听老师讲的课。

沃尔沃把这堂课放在了许知远老师创办的「单向空间」书店。
现实和想象的落差甚至已经让我把绝大部分注意力放在跟许知远老师偶遇、品尝现磨咖啡芬芳这两件事情上了。

不知道这算是忽然的转运还是丧的延续,当我已经不对这个活动抱有希望的时候,又一次被现实打了脸。作为一个「换位思考」思维的爱好者,沃尔沃开场的一个采访小短片就把我的关注点拉回到了课堂里。
主持人问一个外国男人,「你能接受去年我们州的交通事故死亡人数是多少?」
我猜男人此时心里应该是毫无概念,他耸了下肩,「70 ?」

下一刻,当他的 70 个家人好友向他走来,他的回答即刻发生了变化,这次是无比坚定的,「0 !」

这是一个特别值得思考的社会学实验。
当人的观察点被抽离到「上帝视角」,似乎每条生命就只是一个数字;而只有当这些数字背后的生命和我们发生联系时,生命才又变回了生命。
而沃尔沃从一开始就明白这个道理。
跳过 L3
沃尔沃,安全。
这两个词之间的联系紧密程度,就像说歇后语一样自然。
实际上,这也是沃尔沃自认的信仰。
自动驾驶时代,对于开车这件事,沃尔沃提出了一个不新鲜,但颇具争议的观点:人都会犯错。基于这点,沃尔沃认为,「打造真正的自动驾驶才是实现 0 碰撞的正确途径」。
这样的观点很容易让我联想到民航制造业两巨头,波音和空客,一些在底层设计理念上的差异。民航客机或许是目前地球上自动化水平最高的民用交通工具,在处理问题时,波音飞机的最终决定权在人,而空客飞机的最终处理权则在机器。

更信赖机器,似乎是很多欧洲企业的共同选择。
在我的理解里,要么是欧洲人对于自己的产品有绝对自信,相信机器一定比人有更高的容错度;要么是欧洲人觉得自己更偏向浪漫感性的那一面,大是大非面前不如相信更理性的机器。至于答案,或许只能期待一次关于沃尔沃的专访了吧。
回到沃尔沃对于自动驾驶的理解上来,沃尔沃把自动驾驶分为了三个阶段。
第一阶段是「DRIVE」,仍然由驾驶员主导,可以理解为是 L1 级别的自动驾驶。
第二阶段是「CRUISE」,这是一种在系统检测下的高级辅助驾驶,实际上也是目前的现状,可以理解为是 L2 级别的自动驾驶。
第三阶段则是「RIDE」,将实现无须驾驶员监测的自动驾驶,也是现阶段沃尔沃对于这项技术的最高规划,可以理解为是 L4 级别的自动驾驶。

为什么跳过 L3 ?沃尔沃没有直接回答这个问题,而是给出了几张成绩单。
2012 年,沃尔沃推出了第一辆 Drive Me 自动驾驶概念车。

2015 年,Drive Me 进入中国,在北京西六环以 70km/h 时速累计安全行驶了 1200km。

2016 年,作为国内第一个全系标配 L2 级别自动驾驶的量产车,沃尔沃 S90 正式上市。
所谓「跳过 L3」的决策,是基于很多实践而来的。这或许是沃尔沃想表达的意思吧。
L4 的底气
关于第三阶段「RIDE」,准确地说是 Ride Pilot,其实已经不能称它为一个概念。在沃尔沃的计划里,Ride Pilot 将率先在美国加州提供无人监督的自动驾驶服务。
而这个计划向上倒推一步,自然就得是相应的技术支持。
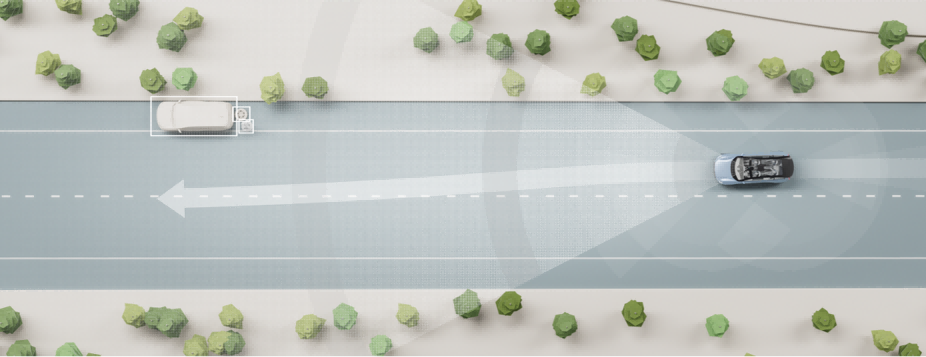
首先是环境感知传感器。
在目前「纯视觉」和「多传感器融合」两大自动驾驶感知路线中,沃尔沃选的是后者。
Ride Pilot 将搭载 Luminar Iris 激光雷达。这是一种 1550nm、300 线车规级激光雷达。
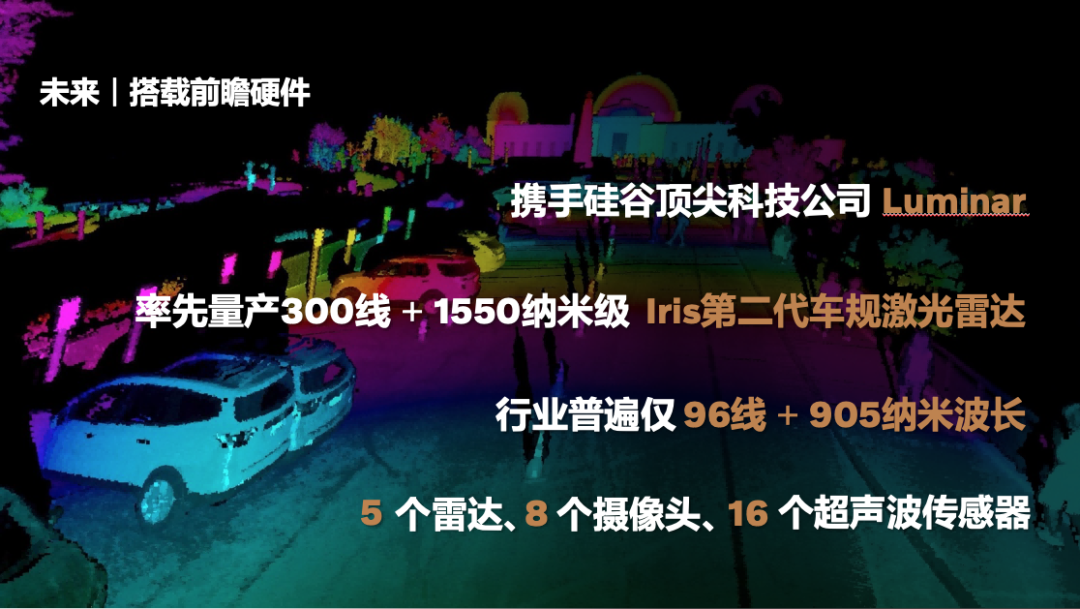
所谓 1550nm,指的是激光雷达所发射激光的波长。
光是电磁波,我们一般用波长来定义不同类型的光。比如我们人眼可见的「红橙黄绿青蓝紫」,它们的波长大致从 380nm 到 750nm 左右,而人眼之所以能看到它们,是因为人眼能吸收这些波长的光。对比当前主流的 905nm 和 1550nm 两种方案,1550nm 距离可见光光谱更远,人眼更难感受到 1550nm 的激光,因此可以使用更大功率发射 1550nm 激光,更大的功率则意味着更长的探测距离。
所谓 300 线,则指的是激光雷达在垂直方向发射出的激光点数。激光雷达是依靠发射激光接受反射来感知世界的,更高的激光束密度也就意味着更高的分辨率和精密度。
扯远了,总结一句话,沃尔沃使用的 Luminar Iris 是目前车用激光雷达的顶流水平。
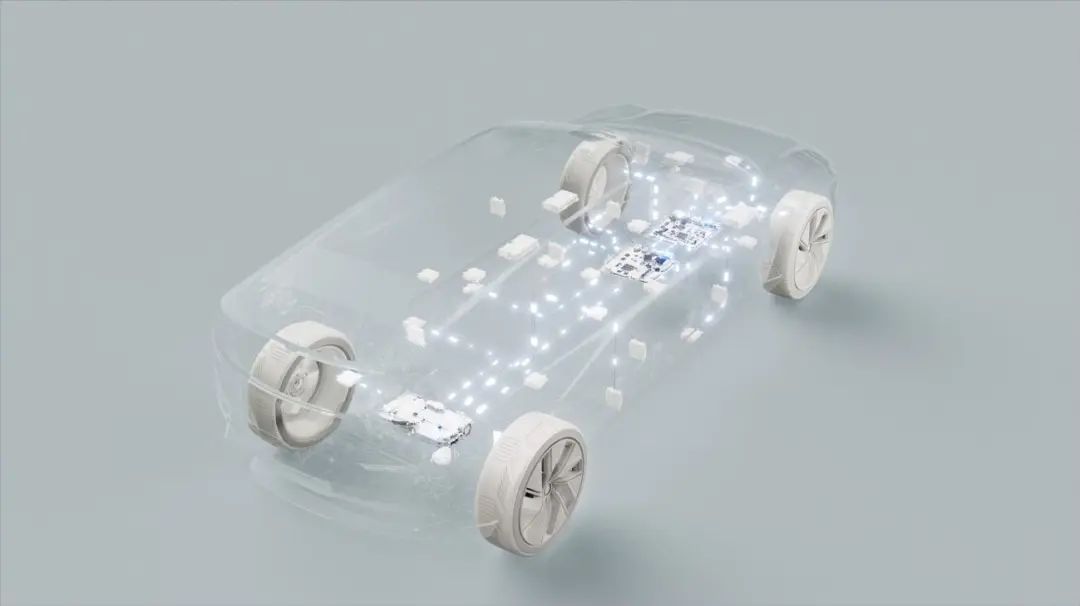
其次是算力平台。
Ride Pilot 将搭载英伟达 Orin-X 芯片,而 254 TOPS 算力的 Orin-X 应该是今年自动驾驶算力市场上最亮的仔。

下面则是表现我认真听讲的关键时刻了,据沃尔沃的培训老师口头透露,沃尔沃的新车都将搭载 4 个或以上的 Orin-X,也就是说,沃尔沃之后的新车,每辆都将是 1000 TOPS 起步的算力怪兽。
第三是软件算法。
Ride Pilot 的软件算法将来自沃尔沃旗下自动驾驶软件开发公司 Zenseact。对于这家公司我不是很熟悉,但它和 Google 母公司 Alphabet 旗下的自动驾驶巨头 Waymo 有独家合作,有了这份背书,大概能打消很多人对于 Zenseact 的疑虑。

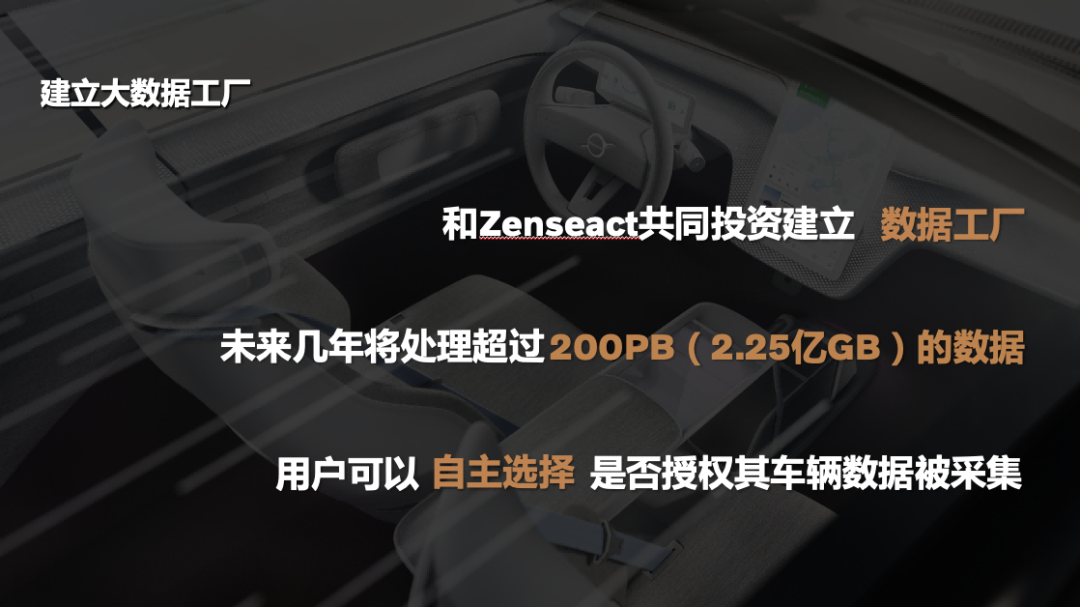
行业都在说,自动驾驶时代将由「数据驱动」,沃尔沃应该也认同这种观点。
最直接的证据是,它和 Zenseact 共同投资建立了数据工厂,未来几年内将处理超过 2.25 亿 GB 的数据,以支撑自动驾驶算法的不断进步。
激光雷达、算力芯片、软件算法……自动驾驶最重要的三部分似乎都集齐了,Ride Pilot 的实车表现会是怎样?
请让时间再飞一会。
基于沃尔沃 Concept Recharge 概念车的、搭载 L4 级自动驾驶 Ride Pilot 的量产新车将于今年底发布,明年初量产。
看起来,实现「0 碰撞」的愿景就近在眼前了。
而下一步,阻碍我跳出「堵车计价器」坑的,可能就是允许更高阶自动驾驶上路的法规,不知几时能排到的车牌,以及最重要的,我的钱包。
原创文章,作者:超级充电站,如若转载,请注明出处:https://www.cydao.com/8632.html




