20 年前,当我第一次拿到「激光笔」这个小玩具时,我一定想不到,我会因为年少无知地拿这玩意照射路人而挨了童年中最毒的一顿揍。
当时的我也一定想不到,它竟然会和 20 年后的自动驾驶产生如此强的联系。
正如拥有过激光笔玩具的熊孩子们一定拿它照过路人,国内怀揣着 L4 级自动驾驶梦想的新势力车企也都不约而同选择了搭载激光雷达。

前者是因为熊孩子「熊」,那么后者是为什么?
这个问题,我想蔚来是比较有资格来回答的,毕竟已开启交付的蔚来 ET7 是目前当仁不让的「自动驾驶硬件天花板」。

而蔚来智能硬件副总裁白剑也专门用了一个小时,来为我们阐述蔚来对于激光雷达的思考。
唱唱反调?
目前智能驾驶领域有两种流派,一是纯视觉,二是多传感器融合。
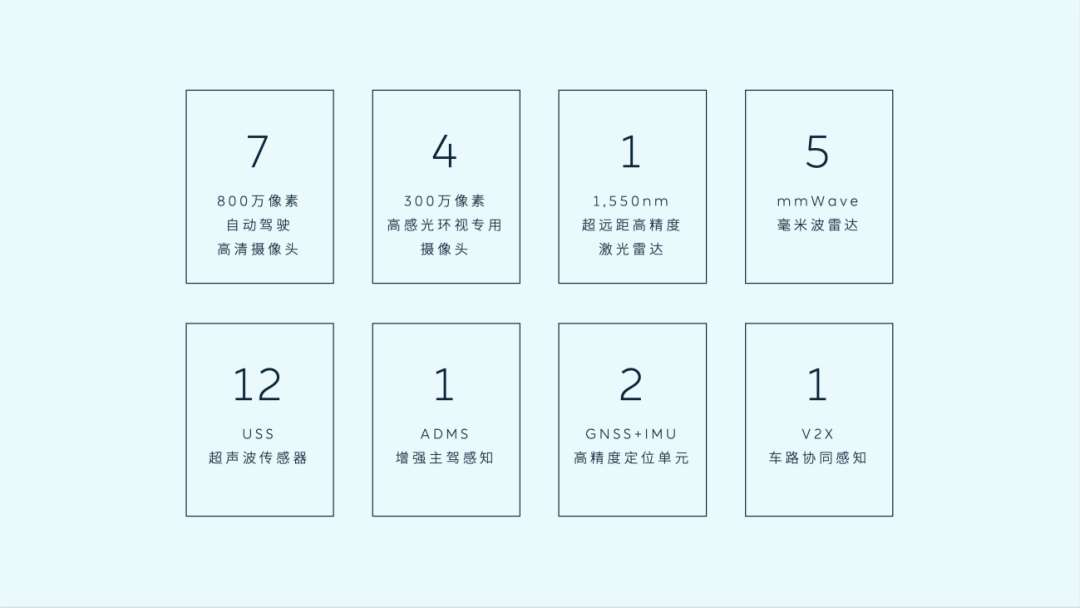
就凭 ET7 上那套配备了 33 个高性能感知硬件的 Aquila 蔚来超感系统,毫无疑问,蔚来属于后者。
虽然马斯克说,「人依靠眼睛和智力驾驶汽车,自动驾驶汽车也应当这样」;虽然特斯拉的纯视觉 FSD 可能是当下已交付方案中最好的智能驾驶解决方案。
但是白剑觉得这种说法有一个误解。
首先,「人的眼睛比现在的摄像头精密很多。」
比如,高架路上飘过的一个塑料袋。这对人来说不要太简单,识别一个无危险的塑料袋简直是下意识的判断行为。
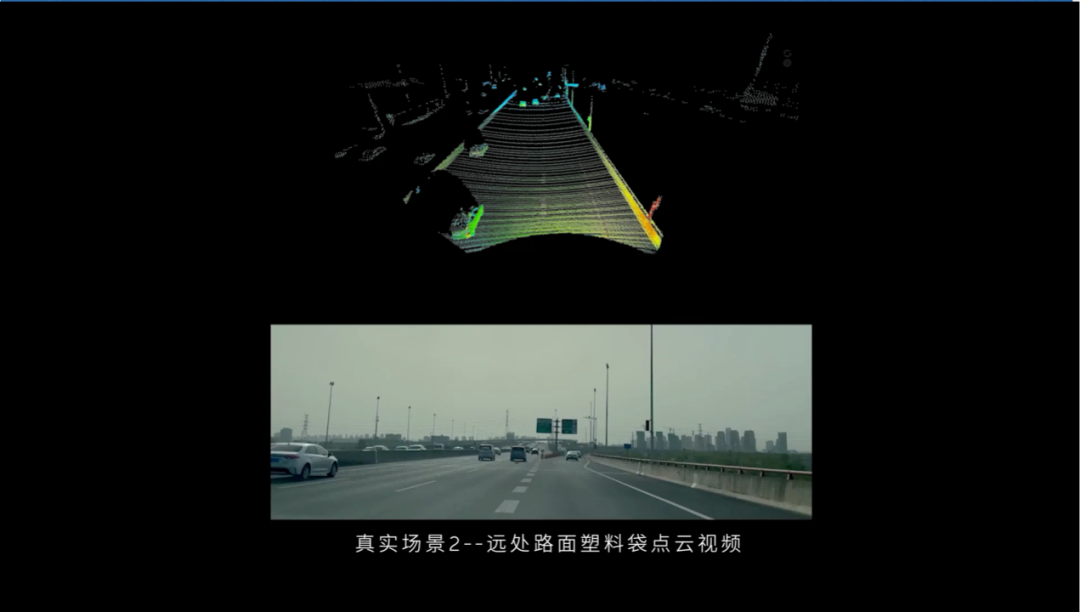
但这对纯视觉摄像头来说,就有些「烧脑」了。特别是当塑料袋离着比较远的时候,它在摄像头的视野中可能就是十几个像素点的 2D 色块信息。至于它是塑料袋还是石头还是其他什么东西,暂且让纯视觉再「烧」一会,我们继续往下说。
其次,「人眼、摄像头还有激光雷达看到的世界是各不相同的。」
曾经我采访过国内一个做纯视觉智能驾驶方案创业公司的工程师,他们当时就比较头疼摄像头在大逆光环境下的表现。
蔚来用了一个「大晴天车开出隧道」的场景来帮助我们理解这个问题。隧道里比较暗,隧道外亮很多很多,在这种对比度差异极大的场景下,人眼会短暂失去视野,这也是老司机会提醒新手出隧道要减速的原因。
更别提,「精密度远差于人眼的摄像头了」。在这种要求超高动态范围的转变场景下,摄像头拍到的画面基本就是一片惨白。
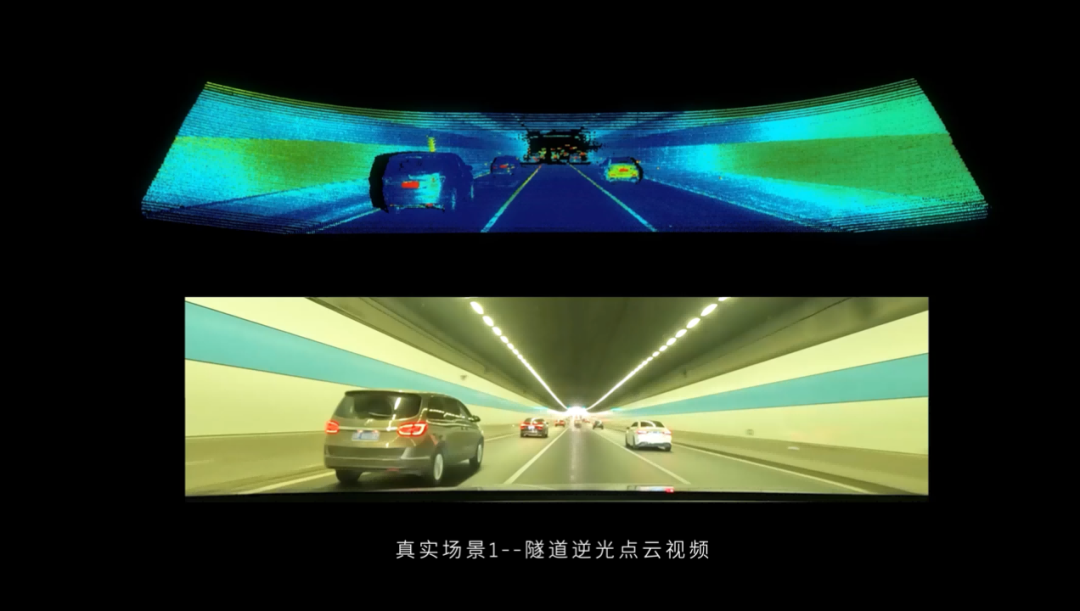
但在激光雷达的视野中,它是依靠前方物体反射回来的激光云图来感知这个世界的,就不存在这个问题。同时,这种不同的感知形式也赋予了激光雷达获取深度信息的能力。通过这个能力,激光雷达可以很清楚地判断高架路上飘过的塑料袋是一个比较轻、比较薄的物体,不会危害行车安全。
基于以上,蔚来说,「我们坚信多传感器融合的技术路线是未来的辅助驾驶和自动驾驶的关键技术路线。」
三个标准
讲完路线,再说技术。
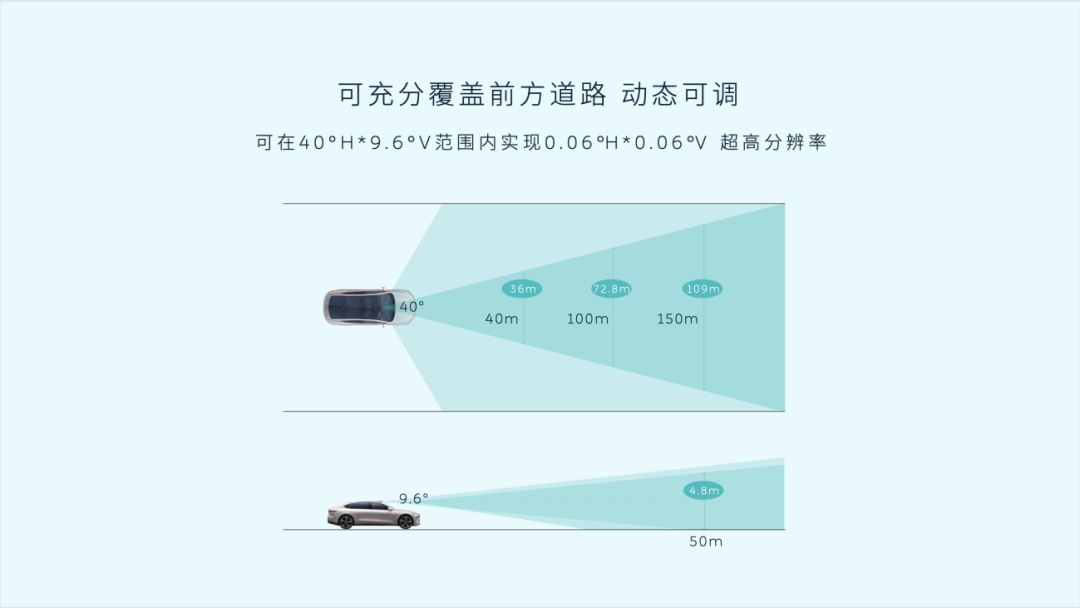
蔚来 ET7 选择了一款 1550nm 波长的激光雷达,这也是世界上第一款已经量产的 1550nm 激光雷达,它的水平视角为 120°,最远探测距离 500m,最高分辨率 0.06°× 0.06°。
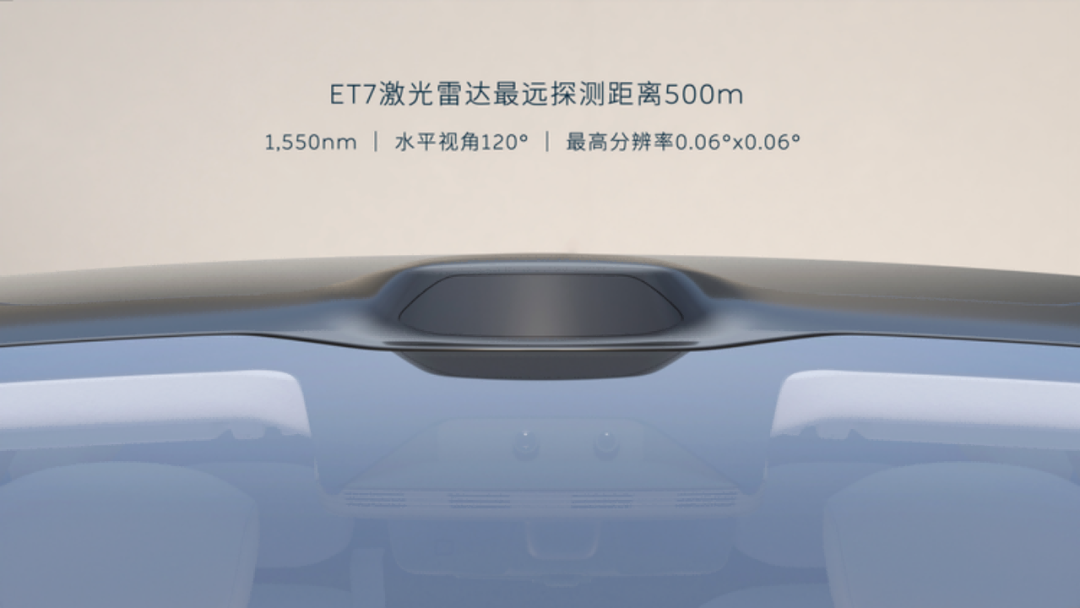
对于这款激光雷达,蔚来喊出了「看得远、看得清、看得稳」的口号。
首先是「看得远」,这一项的主要功臣是 1550nm 波长。
蔚来说,「1550nm 波长的激光能支持大功率发射」。我扒拉扒拉尘封已久的物理知识,咱们来点更硬核的科普。
大概在初中物理课上,我们就学过「光是电磁波」。既然是波,我们就能用波长来定义不同类型的光。比如我们人眼可见的「红橙黄绿青蓝紫」,它们的波长大致从 380nm 到 750nm 左右,而人眼之所以能看到它们,是因为人眼能吸收这些波长的光。
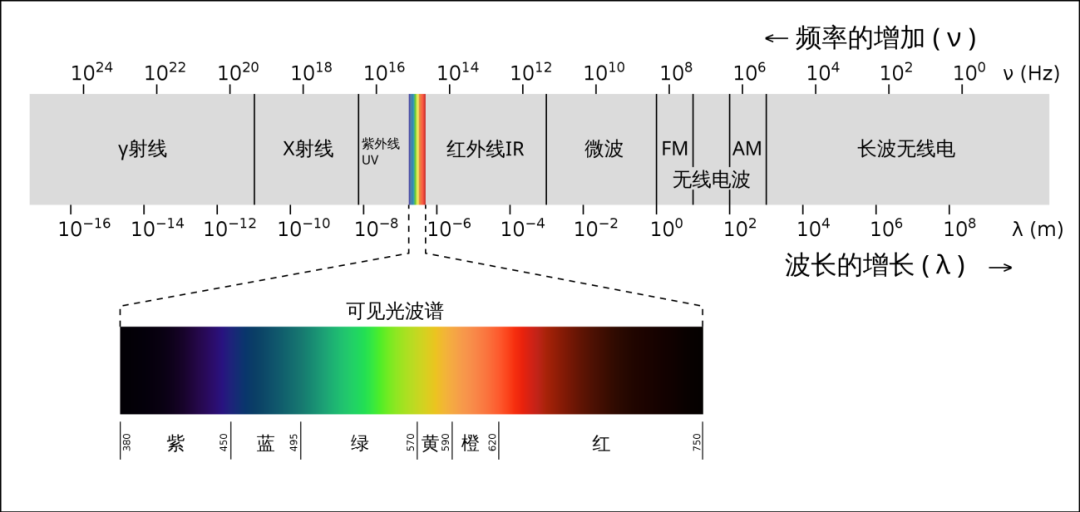
对比当前激光雷达主流的 905nm 和 1550nm 两种方案,1550nm 距离可见光光谱更远。换句话说,人眼更难感受到 1550nm 的激光,而 1550nm 激光也相对更难对人眼造成伤害。
因此,蔚来可以用更高功率、更高能量来发射激光束。功率高了,可不就「看得远」么。
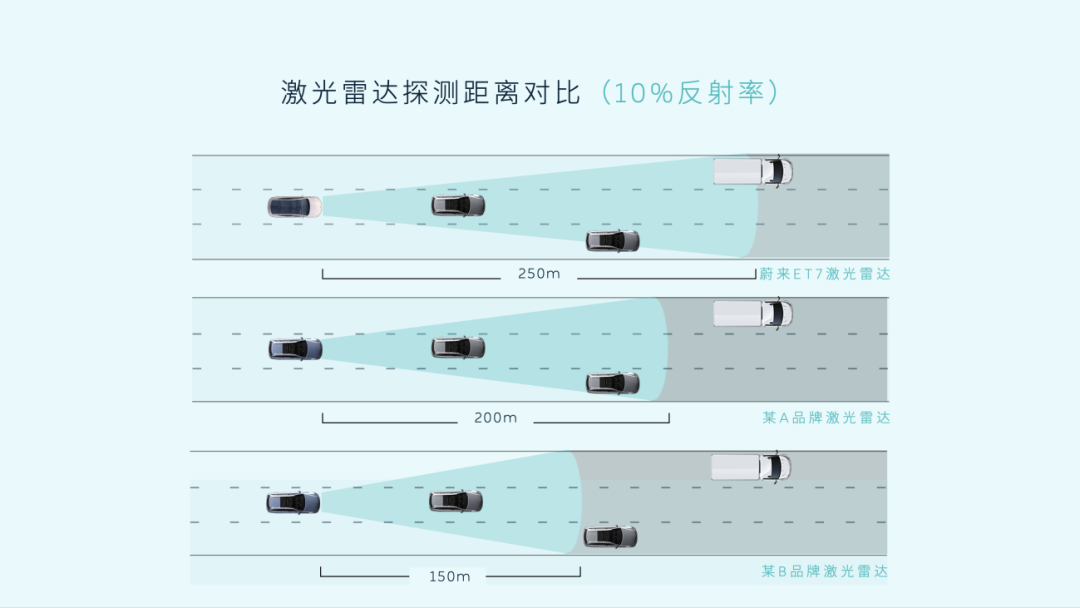
对比其他品牌的激光雷达,蔚来 ET7 所使用的这款激光雷达在 10% 反射率这样比较极限的日常使用场景下仍能 250m 的探测距离。
然后是「看得清」,ET7 的这款激光雷达有个「定睛凝视」的功能。
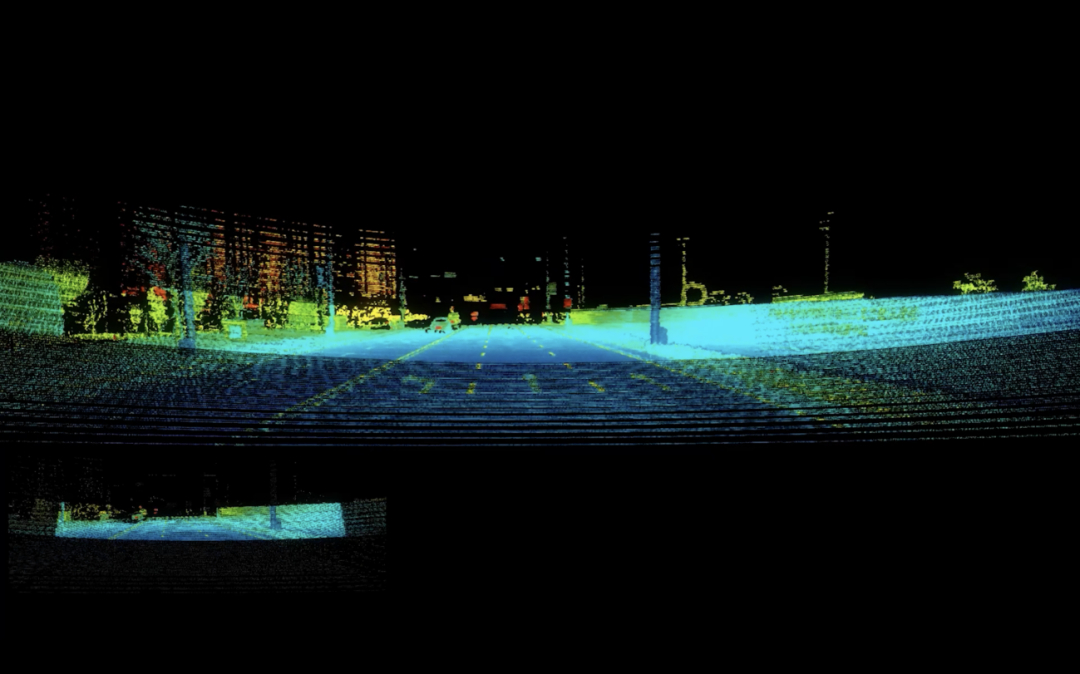
激光雷达输出的 3D 点云图其实也可以看做是一幅幅图像,只不过点云中的每一个点都带了深度信息。既然是图像,分辨率这个概念也适用在 3D 点云图上,分辨率越高,图像也就越清晰。
对此,蔚来拿了一个相对主流的 125 线激光雷达来做了一个对比。
125 线激光雷达的角分辨率为 0.1° H*0.2° V。翻译一下,H 指的是水平方向,V 指的是垂直方向。125 线激光雷达在横向方向上,每 0.1° 可以打一个点,在纵向方向上,每 0.2° 可以打一个点。
而 ET7 激光雷达的定睛凝视有点类似人眼的聚焦功能,在 ROI 区域内,这款激光雷达的角分辨率可以做到 0.06° H*0.06° V。
光看数据可能不太直观,蔚来设定了一个场景,分别用两种激光雷达去照射一个站在 200m 外,身高 1.8m 的行人。得到的结果是,对照组大概有 12 个点照在行人身上,而 ET7 的激光雷达大概有 54 个点。
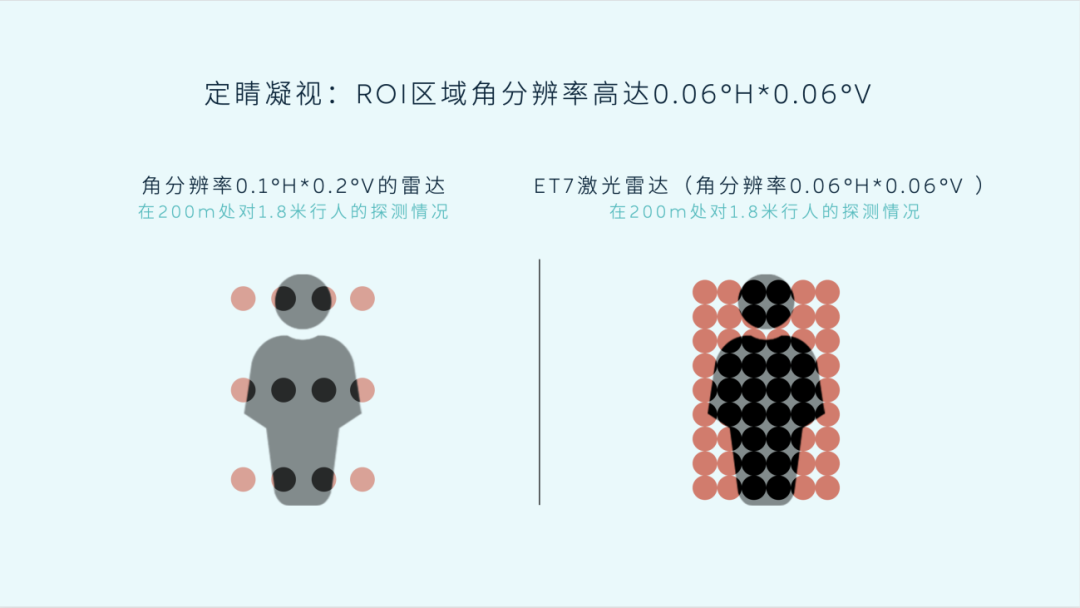
更多的点意味着更高的图像分辨率,分辨率高了,图像更清晰了,对于更高一级的系统来说,识别也相对变得更简单了。
还有「看得稳」,蔚来提到了一个探测概率 POD 的概念。
这个概念可以拿拿屏幕坏点来举例。国家三包规定,液晶屏幕坏点在 3 个及以下的都是合格品。这是因为,在普通消费级电子领域,屏幕坏点在工程实现上是不可避免的。激光雷达的扫描结果也有这个现象。
比如,激光雷达标称打出去 10 万个点,但实际上,受激光能量、探测接受灵敏度、系统稳定性等因素影响,最终能被精确接收到的点往往是不到 10 万个的,这个就是探测概率。
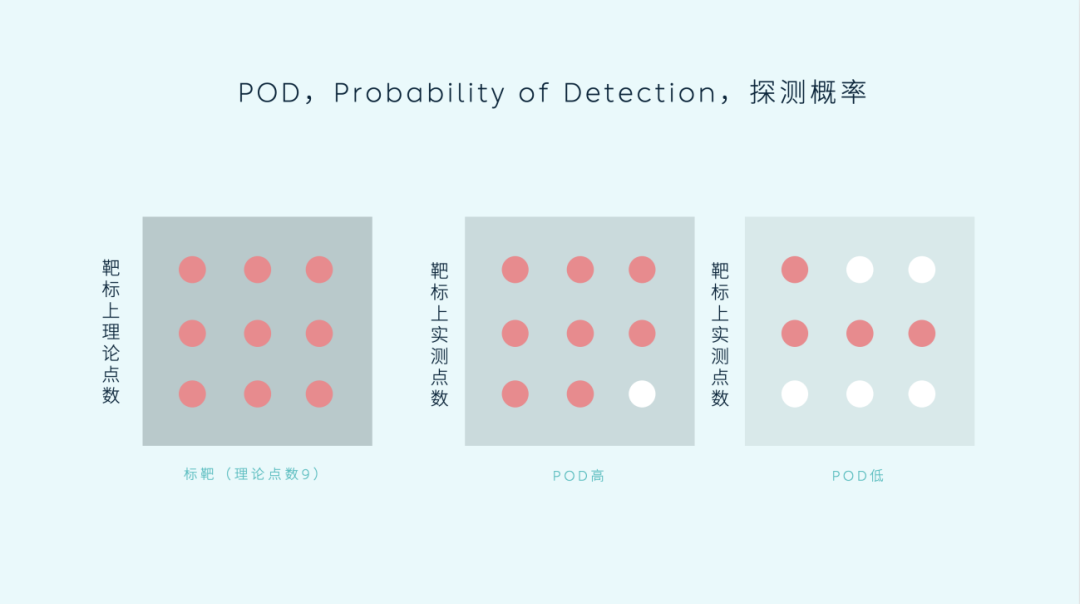
蔚来宣传他们这款激光雷达的 POD 能做到 90%,高于很多别的激光雷达。而相对较高的 POD,也就意味着更准确的探测结果。
标准之外
在激光雷达本身的性能之外,蔚来还提了一些别的东西。
比如落地速度。这款激光雷达从立项到上车,用了不到两年。有的同学以为 2 年很长,但实际上在汽车行业,这个过程涉及到零部件厂商的开发、整车厂的匹配、验证,这一套下来往往需要三、四年甚至更长的时间。
比如风阻系数。ET7 激光雷达采用了外突的瞭望塔式设计,却实现了 0.208 的超低风阻系数。这也是个值得说的点,毕竟很多没有激光雷达、没有外突瞭望塔的车型,风阻系数却比蔚来 ET7 还要高不少。

之所以能做到这些,是因为这款激光雷达是蔚来和图达通联合开发的。

激光雷达的结构可大致分为光学、电路、外形等几部分。像电路、外形,这些是蔚来比较擅长的方面,则由蔚来主导了相关开发。于是,怎么样来布置,怎么样能和车身融合得更好,这些问题在设计之初就被考虑到了。
而蔚来和我们说了这么多,我想蔚来最终想表达的是,这是一款先进的激光雷达,这是一款稳定的激光雷达,这更是一款可以信任的激光雷达。
而我对它最大的遗憾则来自等待。目前,ET7 上的这款激光雷达只应用在了 ACC 和 LCC 上,至于我们所期待的更多应用场景,比如 NOP+,则还需要再等一等。蔚来预计 NOP+ 将在三季度开启交付。

同时,我还特别关心干扰的问题。
很多特斯拉车主应该都有这种体验,当你开着一辆特斯拉跟在另一辆特斯拉后面时,不出意外,你车机屏幕上的距离警报就开启了「蹦迪模式」。这是因为两边的雷达由于波段近似,发生了干扰。
不过好在,这种近距离跟车一般都是低速状态,除了烦人闹眼,也没啥太大的危险性。
但激光雷达就不一样了,它照射距离远,又关系到自动驾驶系统的运作。要是路上跑的带激光雷达的车多了,它们之间会发生干扰吗?
白剑的回答是,不会。
「激光雷达有一定的编码能力,每一个脉冲打出去接收回来都有一定的 ID,我们可以识别出来。」

蔚来的意思是,放心大胆在街上用激光雷达吧。
当 20 年前的熊孩子已长大,手里的激光笔也换成了头顶的激光雷达,今天,我再也不会因为在路上开了激光雷达照人而挨揍了。
感谢科技,感谢蔚来。
原创文章,作者:超级充电站,如若转载,请注明出处:https://www.cydao.com/8467.html




